
Robotok gyengédségét teszteli a Toyota

A Toyota új robotkarja puha, mint az emberi ujj, és ugyanúgy képes tapintással felismerni a tárgyak alakját – igaz, nem a szokványos módon.
Túlzás nélkül új korszakot nyithat az embereket segítő robotok fejlesztésében az az innováció, amelyet a Toyota fejlett technológiákkal foglalkozó kutató intézete, a Toyota Research Institute (TRI) mutatott be a napokban.
A Toyota hosszú évek óta dolgozik olyan robotok fejlesztésén, amelyek képesek hatékonyan, megbízhatóan gondját viselni az egészségi állapotuk vagy életkoruk miatt támogatásra szoruló embereknek. Ennek fontos eleme, hogy a robotok képesek legyenek biztonságosan megfogni, felemelni, átadni és átvenni tárgyakat. Napjainkban ez már részben megvalósult: a Toyota a koronavírus-járvány miatt elhalasztott tokiói olimpiai játékokon már élesben tervezte alkalmazni a személyes interakcióra képes T-HR3 humanoid robotot, illetve a mozgásukban korlátozott látogatók kiszolgálására tervezett, pontosan manőverezhető fogókarral szerelt Human Support (HSR) robotot.
Ez utóbbi kamerák segítségével azonosítja a céltárgy méretét és helyzetét, nem rendelkezik azonban tapintásérzettel, ami elengedhetetlen volna ahhoz, hogy ne csak feladatokat tudjon végrehajtani, hanem biztonságosan együtt is működjön a gondjaira bízott személyekkel – például olyan természetességgel tudjon átadni nekik egy pohár italt, mintha embertől vennék át.
Erre kínál innovatív megoldást a Toyota Research Institute új fejlesztése, amelyben egy rugalmas felület váltja ki a fogókarok hagyományosan kemény felületét. A projekt ötletgazdája és vezetője, Alex Alspach olyan latexbuborékot illesztett a robot „ujjbegyeire”, amely pont eléggé feszes ahhoz, hogy biztonságosan meg tudja ragadni a tárgyakat, ám kellően lágy ahhoz, hogy idomulni tudjon ezekhez a tárgyakhoz.
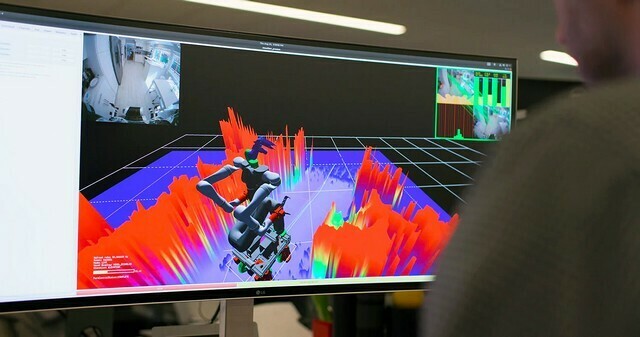







A barátságos Soft Bubble Gripper (kb. lágy buborékos fogókar) névre keresztelt szerkezet ugyanis így képes felismerni azokat: idegvégződések helyett egy, a hólyag belsejében elhelyezett infravörös (azaz teljes sötétben is működő) kamera figyeli a latexfelület alakváltozásait, ebből következtetve a robot „kezében” tartott tárgy formájára és keménységére.
Ehhez a mérnökök egy sűrű pontmátrixot vittek fel a latexbuborék belső felületére; a kamera a pontok egymáshoz viszonyított helyzetének változásából, a pontok, illetve az azok közötti, üres szakaszok megnyúlásából következtet a hólyag külső felszínén végbemenő fizikai folyamatokra.
A projekt munkatársai szerint a rendszer nagyjából egy másodperc alatt képes az adott tárgy azonosítására. Ez nem sokkal lassabb annál, mint amikor a sötétben vagy egy táska mélyén tapogatózva megragadunk valamit, és tapintás alapján kitaláljuk, mi van a kezünkben. Mivel a latex nemcsak rugalmas, de eredendően tapad is, a robotnak elég viszonylag csekély erővel megragadnia azt, ami lehetővé teszi egy másik funkció megvalósítását.
Az „optikai tapintásérzékelő” nemcsak a statikus, de a dinamikus erőhatásokat is képes észlelni, azaz regisztrálja a tárgy elmozdulását. A mozgás irányából pedig lehet következtetni arra, hogy a test kicsúszott az ujjak közül, és le fog esni (mely esetben a robot összeszoríthatja ujjait), vagy éppen a kiszolgált személy veszi ki a robot kezéből, és így nemcsak el szabad, de el is kell engednie azt.
Természetesen a két véglet közötti bármilyen helyzet elképzelhető: a Toyota Research Institute által közzé tett videóban például a robot egy akadályhoz érinti, és annak segítségével finoman elforgatja a fogókarok között tartott tárgyat – ez a cselekvéssorozat, amelyet mi, emberek gondolkodás nélküli tudunk végrehajtani, valójában az észlelő és mozgató rendszerek rendkívül összetett együttműködését feltételezi.
Egy másik példában üres borospoharakat helyez egymásra magabiztosan és gyorsan: egy ember számára megnehezíti a feladat végrehajtását a tudat, hogy törékeny eszközökkel dolgozunk, a robotnak azonban teljesen mindegy, hogy milyen tárgyakat mozgat, csupán programozásától függ, hogy milyen finoman vagy durván kezeli azokat.
A harmadik teszt rendkívül nehéz volna egy hagyományos, kameravezérelt robot számára. A mosogatóba összevissza bedobált, hasonló tárgyak közül ugyanis ránézésre szinte lehetetlen megállapítani, hogy melyeket kell a szelektív kukába dobni (PET-palack), és melyeket a mosogatógépbe helyezni (bögrék), tapintással ugyanakkor gyorsan azonosítható a tárgy.
Szándékosan ilyen hétköznapi, egyszerű feladatokkal tesztelik robotjukat a Toyotánál, hiszen pontosan a mindennapi kihívások leküzdésére szánják. Mindez persze mit sem érne, ha drága anyagokból, költséges technológiákkal valósították volna meg robotjukat, ám azt jelentős részben már meglévő rendszerek (pl. kamera) felhasználásával építették meg – ami különlegessé teszi, az a vezérlő szoftver.
Arra már csak a projekt közben döbbentek rá a fejlesztők, hogy megoldásuk nemcsak a működést, de a tanulást is elősegíti. Egy kamera alapú, „látó” robotot hosszadalmasan kell megtanítani arra, hogy minden szögből felismerjen egy adott tárgyat. A „tapintó” robotnak ezzel szemben elég odaadni egy halomnyit az adott tárgyból, és engedni, hogy játsszon vele: ismételten megfogja, megemelje, forgassa, letegye, leejtse azt – pontosan úgy, ahogyan a gyermekek megismerik környezetüket.
Fotók és videó: Toyota Research Institute








